


ER130-4-2800是一款中大负载机器人,手腕部可搬运负载130 kg,工作可达半径2800 mm。
功能特点
采用全新拓扑优化设计,使得整机质量轻、刚度高,具有良好的动态响应性能,配合高速可视化的智能码垛工艺包,效率提升20%,帮助客户多快好省的完成工作;
集成了多个行业码垛专用工艺包,配合软PLC和各种总线接口,帮助客户轻松面对各种工艺挑战;
高性能碰撞检测功能帮助提高安全系数。
适用场景
可应用于搬运、码垛、上下料等场景。
适用行业
适用于金属部件、光伏、物流、水泥、食品饮料等行业。
产品参数
型号 | ER130-4-2800 | |
机构 | 多关节型机器人 | |
轴数 | 4轴 | |
手腕部可搬运负载 | 130 kg | |
重复定位精度 | ±0.3 mm | |
本体重量 | 970 kg | |
较大臂展 | 2800 mm | |
本体防护等级 | IP40 | |
电柜防护等级 | IP43 | |
安装条件 | 环境温度 | 0~45 ℃ |
环境湿度 | 通常在75%RH以下(无结露现象) | |
振动加速度 | 4.9 m/s²(0.5 G以下) | |
驱动方式 | 使用AC伺服电机进行电气伺服驱动 | |
安装方式 | 地面安装、支架安装 | |
手腕允许扭矩 | J 4 | 36.25 N.m |
手腕允许惯性力矩 | J 4 | 50 kg.㎡ |
较大单轴速度 | J 1 | 110°/sec |
J 2 | 110°/sec | |
J 3 | 105°/sec | |
J 4 | 330°/sec | |
各轴运动范围 | J 1 | ±178° |
J 2 | +42°/-85° | |
J 3 | +85°/-55° | |
J 4 | ±360° | |
J 2 +J3 | -115°<(J2 +J3)<+20° | |
动作范围
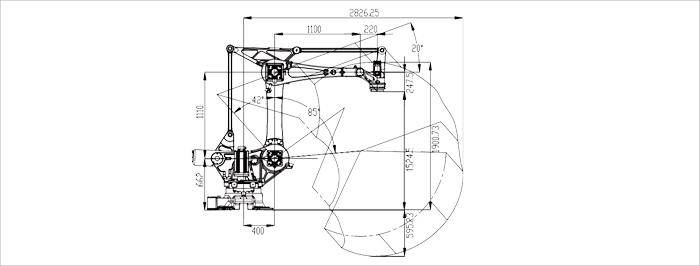

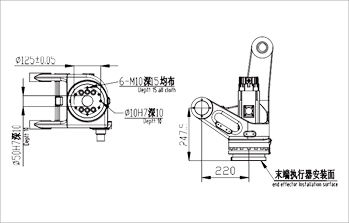
ER130-4-2800机器人
ER130-4-2800机器人 2022-6-9 本文被阅读 1110 次
| 上一条:ER50-2100机器人 | 下一条:ER180-4-3200机器人 |


